Robo-grammetry of my Worn out Stuff
Project created for Golan Levin’s Experimental Capture at CMU
Project Statement
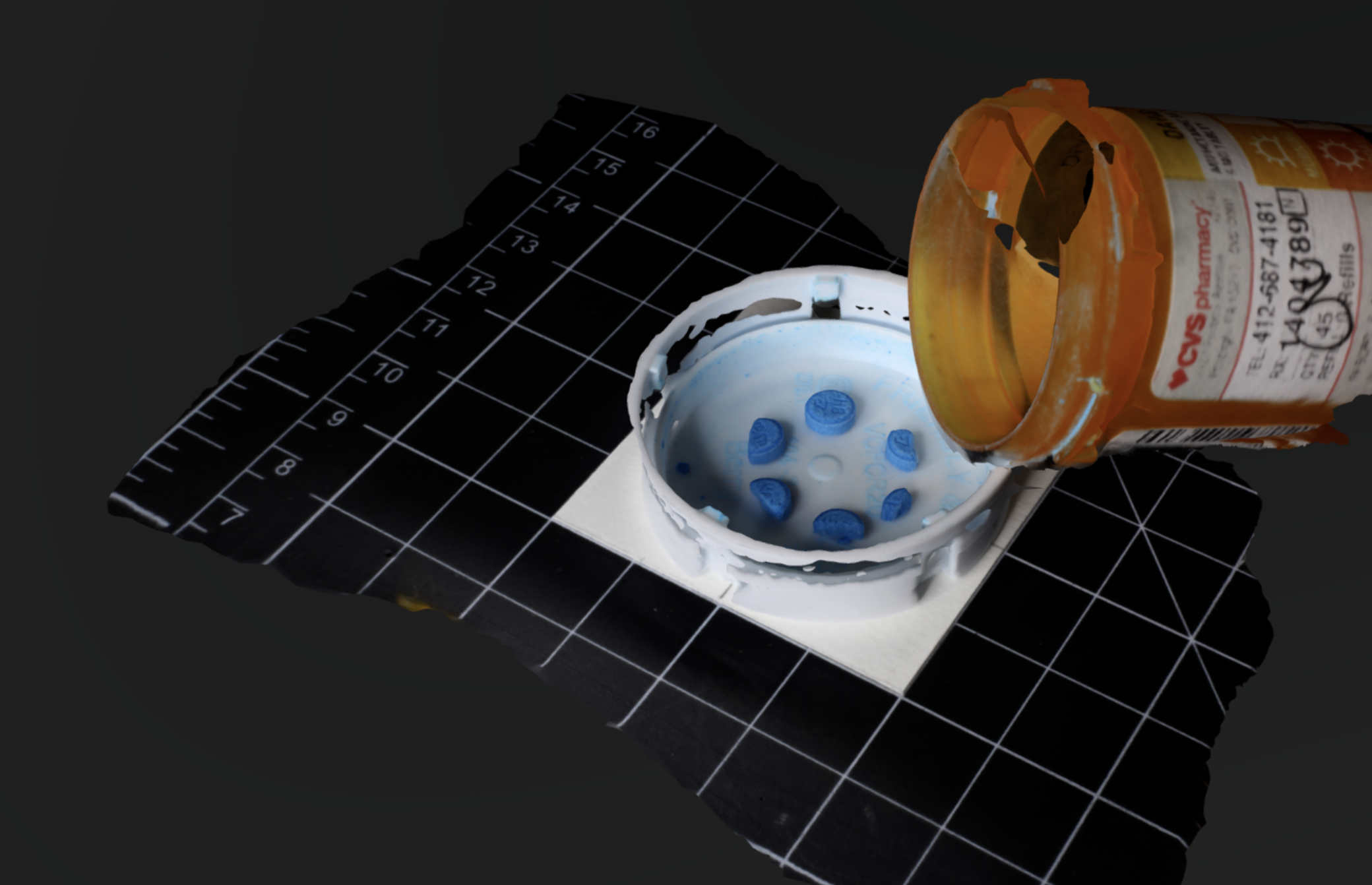
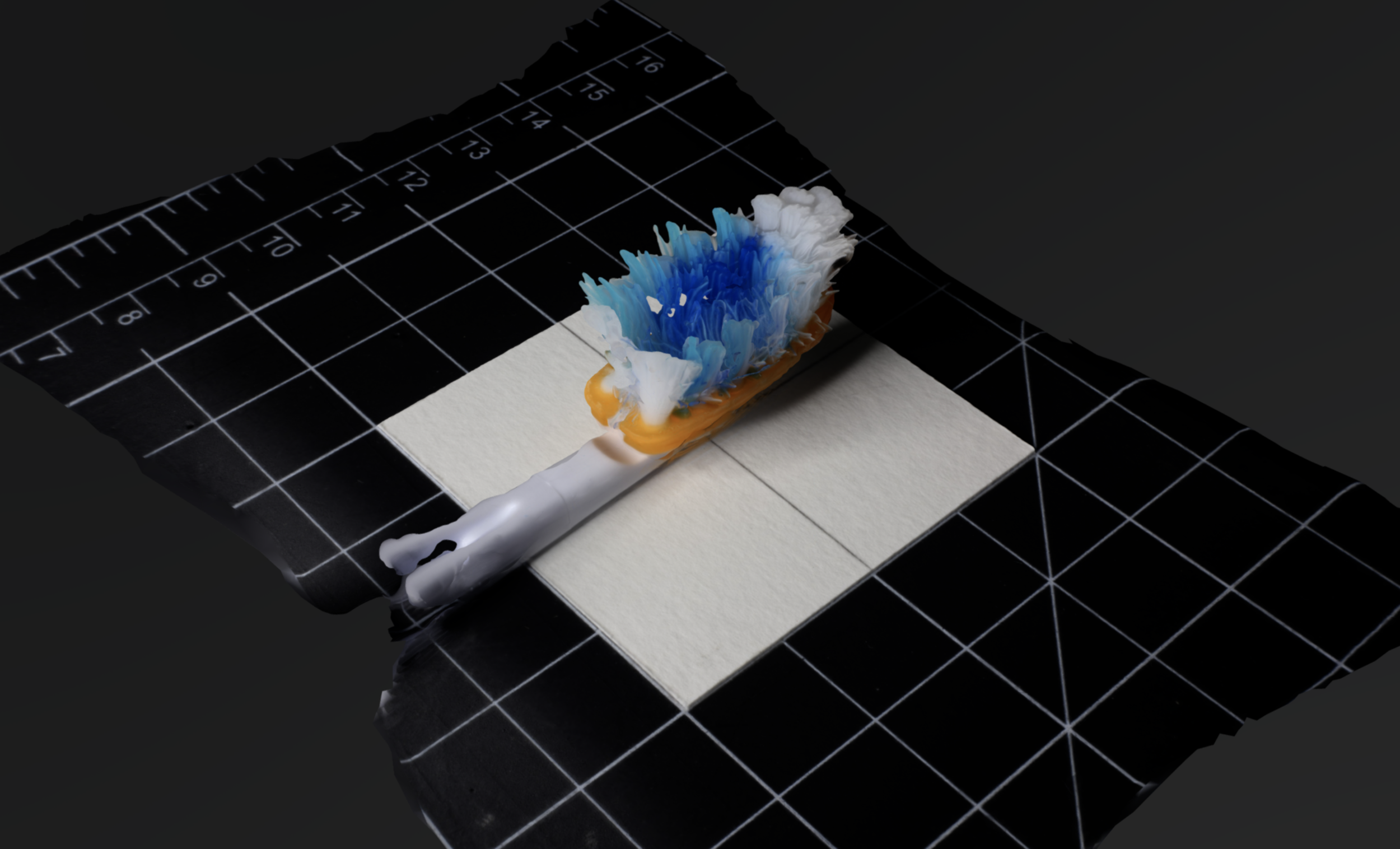
In this project I explored the emergent textures of my worn out stuff – an over used tooth brush, a pill bottle that’s been in my bag for way too long, a charging cord that’s slowly busting out of it’s casing. I explored the textures of these things through robot controlled photogrammetric system (robo – grammetry).
Building a Robo-grammetric System
This project emerged from my learning goal to gain familiarity with the studio for creative inquiry’s universal robot arm. I was able to make the robot step through a spherical path, staying oriented on one point in a working frame, while an Arduino controlled shutter release triggered a camera in sync with the robots motion. The robot script was laid out so I could calibrate the working frame with the plane of my cutting mat. The goal of all this was to create highly standardized photogrammetric composition.
My capture machine was a robotically guided camera that snapped 144 distinct photos of a sampled object while stepping through a spherical path.